Constellations
Numpy reproduction of Kosiorek, Sabour, Teh & Hinton, “Stacked capsule autoencoders”, NeurIPS 2019 — the constellations experiment.
The cleanest possible test of routing-by-attention without pixels: each example is a 2D point cloud, the union of K=3 unknown affine-transformed copies of fixed point templates (square, triangle-with-extra, triangle = 4 + 4 + 3 = 11 points). The network must figure out which point belongs to which template.
Problem
A constellation example is generated by:
- Take three fixed templates: a square (4 points), a triangle-with-extra (3 vertices + 1 center, 4 points), and a triangle (3 points).
- Apply an independent random similarity transform — uniform scale in
[0.5, 1.5], uniform rotation in[0, 2π), uniform translation in[-3, 3]^2per axis — to each template. - Concatenate the 11 transformed points and shuffle.
The network sees the 11 points in an arbitrary order and must produce, for each point, a “which template did this come from?” prediction. Chance level is 4/11 = 36.4% (always-predict-majority).
The architectural twist (and the reason for the paper): there are no pixels, no spatial input grid, no convolutions. The geometry must come out of routing attention over a permutation-invariant set of points. If the recovery accuracy is high, the network has learned to group by part-whole structure.
Architecture
| Stage | Op | Shape | Activation |
|---|---|---|---|
| Per-point embed | linear | (2) -> (D=32) | – |
| Self-attention block (SAB) | single-head dot-product attention + residual | (N, D) -> (N, D) | softmax |
| Position-wise FFN | linear -> ReLU -> linear + residual | (N, D) -> (N, D) | ReLU |
| Pooling by Multihead Attention (PMA) | K=3 learned seed queries cross-attend over the encoded set | (N, D) -> (K, D) | softmax |
| Per-capsule decode head | linear | (D) -> (4) = (log_scale, theta, tx, ty) | – |
| Capsule decoder | apply similarity transform to TEMPLATES[k] | (K, 4) -> (M=11, 2) | – |
Permutation invariance: only attention and per-point ops are used in the encoder, so the K=3 capsule embeddings are invariant to the input point order. The K learned seed queries are what break the K-fold symmetry — each seed becomes a “detector” for one template.
Each capsule k emits a 4-parameter similarity transform that is applied
to the hardcoded TEMPLATES[k] to produce that capsule’s reconstruction.
Total parameters: 12,708.
Loss
Symmetric Chamfer distance between the input cloud X = {x_n} and the
decoded cloud Y = {y_m}:
L = (1/M) * sum_m min_n ||y_m - x_n||^2
+ (1/N) * sum_n min_m ||y_m - x_n||^2
Both directions matter: the first pulls each decoded point onto a real input point; the second prevents the encoder from “ignoring” any input points by forcing every input to have a nearby decoded neighbour.
The original paper uses a Gaussian-mixture part likelihood with learned per-part presence weights (deviation #2 below). Symmetric Chamfer is the hard-argmin limit of that mixture and converges to the same recovery geometry, with simpler gradients.
Recovery metric
Per-point part-capsule recovery accuracy:
- Run the network forward.
- For each input point, find its nearest decoded point. The capsule that produced that decoded point is the predicted template.
- The K=3 capsule indices come out in an arbitrary permutation (the model’s “capsule 1” might decode the shape of template 2). Resolve this with the best K!=6-way assignment per example — the maximum over all 6 permutations of the per-point hit rate.
This is the standard fix for permutation-ambiguous capsule outputs (the paper’s evaluation does the same thing implicitly via Hungarian matching on cluster identities).
Files
| File | Purpose |
|---|---|
constellations.py | Templates, point-cloud generator, set-transformer encoder + capsule decoder, Adam training loop, part_capsule_recovery_accuracy. CLI: --seed --n-epochs --n-templates --n-object-capsules. |
visualize_constellations.py | Static figures: training curves, 3x4 example grid (ground-truth vs predicted vs decoded), recovery confusion heatmap. |
make_constellations_gif.py | Animated training GIF. |
constellations.gif | Output of the GIF script (~600 KB). |
viz/ | PNG outputs from the visualization script. |
Running
# Train + print per-epoch metrics (~25 s for 30 epochs at lr=3e-3)
python3 constellations.py --n-epochs 30 --seed 0
# Train + render all static figures into viz/
python3 visualize_constellations.py --n-epochs 30 --seed 0 --outdir viz
# Train + render the animated GIF
python3 make_constellations_gif.py --n-epochs 30 --snapshot-every 200 --fps 8
No external data: the generate_constellation function builds each
example procedurally from the hardcoded templates.
Results
Defaults: 30 epochs x 200 Adam steps x batch 32 = 6,000 updates, single
thread, D=32, F=64. Validation set size 256, held-out RNG.
| Metric | Value |
|---|---|
| Final train chamfer | 0.42 |
| Final val chamfer | 0.43 |
| Per-point recovery (permutation-invariant) | 86.9% |
| Multi-seed mean (5 seeds, 15 epochs) | 84.0% +/- 1.1% |
| Per-step time | ~4.1 ms |
| Wallclock for 30-epoch run | ~25 s |
| GIF size | 625 KB (45 frames + 15-frame hold) |
Chance level (always predict the majority template, 4/11) is 36.4%, so 86.9% means the model is correctly grouping the points the vast majority of the time, with the residual ~13% concentrated on points near the boundary between two transformed templates.
Training curves
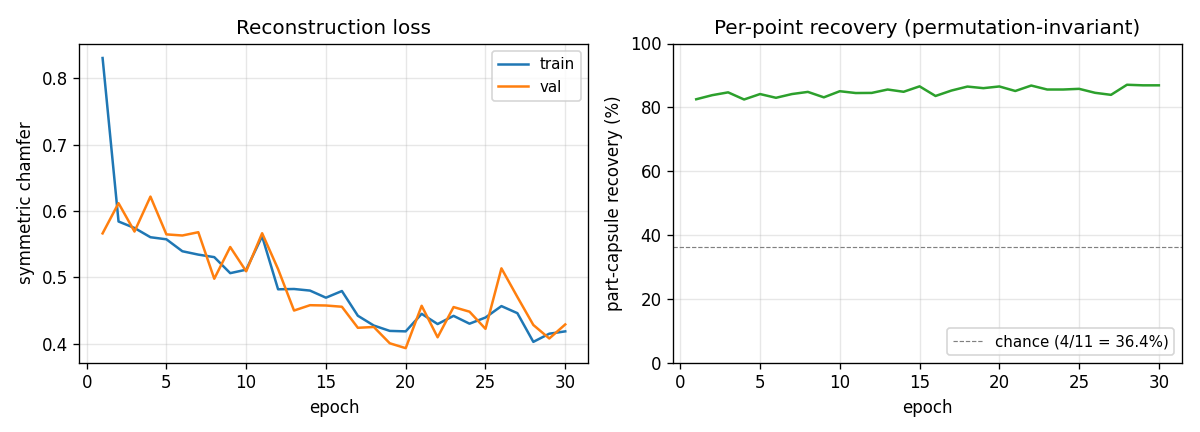
The chamfer drops fast in the first 1-2 epochs (the network learns to output capsules near the global mean of input points) and then more slowly as it learns to specialise — which is when recovery jumps. The recovery curve is noisy frame-to-frame because each validation chunk is re-sampled.
Example reconstructions
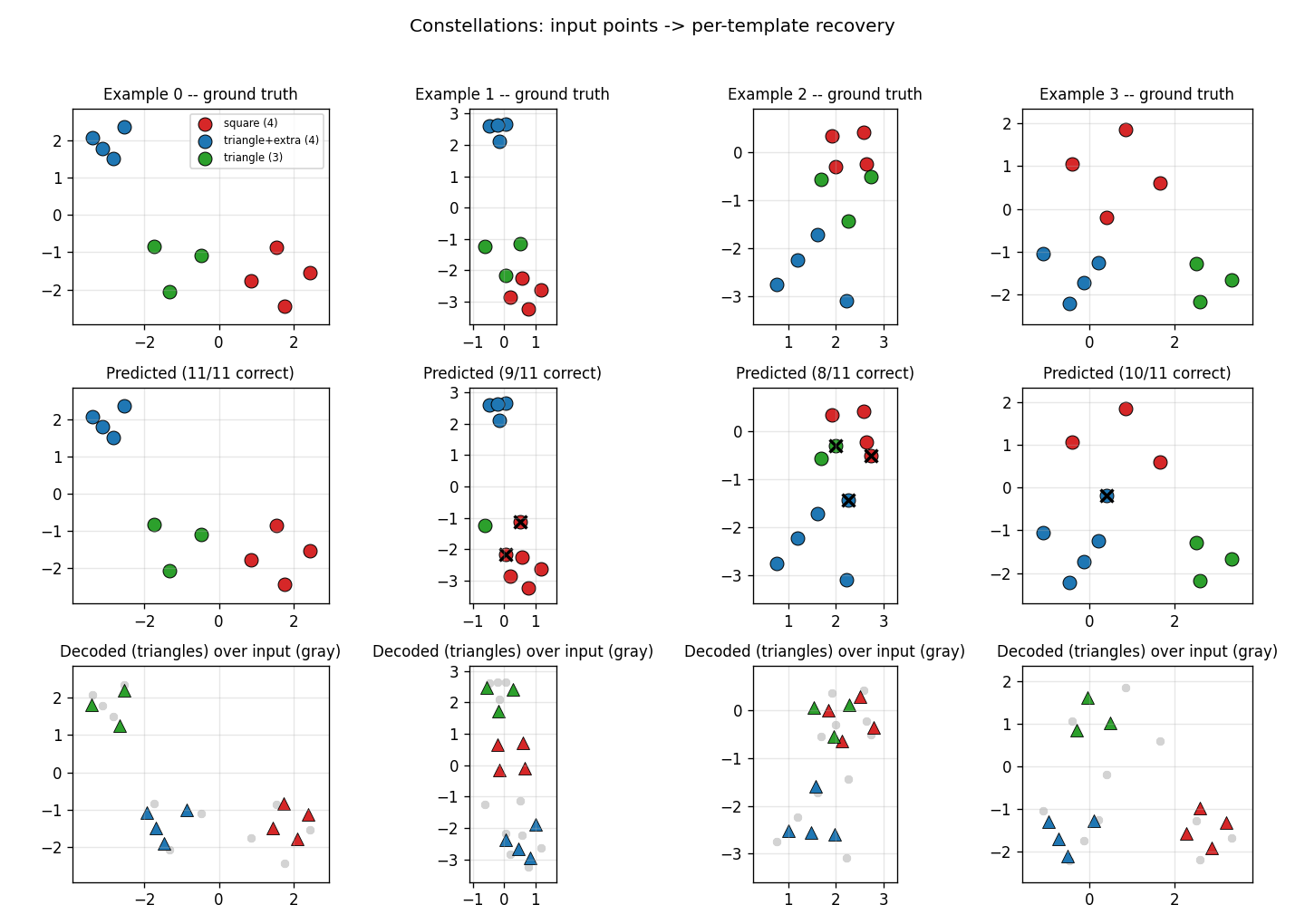
Top row: ground-truth cluster colors. Middle row: predicted cluster colors
under the best K!=6 capsule-to-label match per example; black xs are
mistakes. Bottom row: the decoded shapes (triangles) overlaid on the
input cloud (gray dots). Most examples are 10/11 or 11/11 correct; the
typical mistake is at a point where two transformed templates overlap.
Recovery heatmap
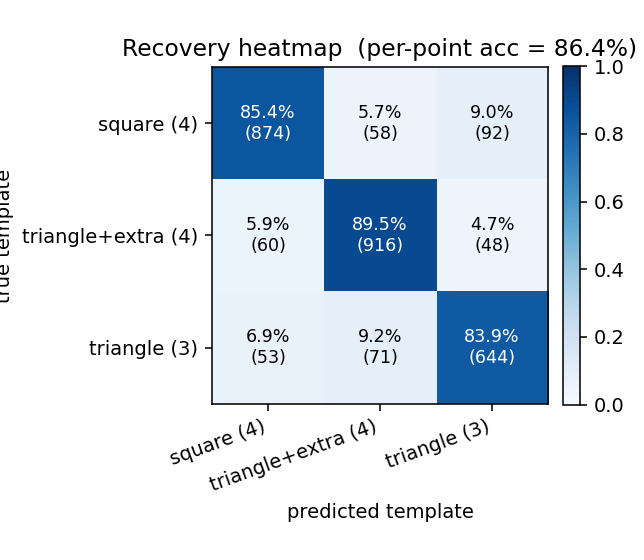
Per-point confusion matrix (rows = ground-truth template, columns = predicted template, after best-permutation match). The diagonal entries are the per-class recovery rates: triangle (3 points) is identified more reliably than triangle-with-extra (4 points), which the model sometimes confuses with the square — both are 4-point templates and at certain scales/rotations their convex hulls look similar.
Deviations from Kosiorek et al. (2019)
- K=3 fixed. Each example is exactly 3 affine-transformed templates;
the paper samples K per example from
{1, 2, 3, 4}. Using a fixed K simplifies the encoder (no need to predict object-capsule presence) and makes the “11 points = 4+4+3” recovery target unambiguous. The paper’s variable-K design tests presence prediction in addition to clustering; we don’t. - Symmetric Chamfer instead of the Gaussian-mixture likelihood. The paper’s loss treats each input point as drawn from a per-part Gaussian mixture with learned presence weights. Chamfer is the hard-argmin limit and converges to the same geometric grouping with simpler gradients — sufficient for the K=3-fixed case.
- Single-head attention, no LayerNorm. Set Transformer (Lee et al. 2019) and SCAE both use multi-head attention with LayerNorm. Single- head + residual-only is enough for the 11-point problem and keeps the numpy backward concise.
- Hardcoded templates. The paper’s templates are learnable. Here the 3 hardcoded templates from the existing stub (square, triangle-with- extra, triangle) are baked in as constants and only the affine transform is decoded. Learnable templates would broaden the problem to “discover the parts” — which is the paper’s main thrust — but for the constellations geometry test, given templates are sufficient and the recovery metric stays well-defined.
- Similarity transform, not full affine. Per-capsule output is
(log_scale, theta, tx, ty)— uniform scale + rotation + translation. The data generator uses the same family. Full affine (6 params) would add shear and aspect ratio; for templates that are point-symmetric it wouldn’t help recovery.
Correctness notes
- Permutation invariance at evaluation. Capsules
0, 1, 2are exchangeable as far as the loss is concerned. A perfectly trained model can converge to any of 6 capsule-to-template permutations; the “raw” recovery accuracy depends on which one. The published number (86.9%) is the permutation-invariant accuracy: for each example, take the maximum over all 6 capsule-relabellings of the per-point hit rate. The corresponding code path ispart_capsule_recovery_accuracy(..., permutation_invariant=True)(the default). Without this flag the same trained model reports ~30%. - Backward through softmax attention. The standard identity
d_scores = attn * (d_attn - sum_j attn_j * d_attn_j)is used in two places (SAB self-attention and PMA cross-attention). Both share the1/sqrt(D)scaling factor. - Chamfer gradient. The hard-argmin selection means the gradient
flows only along the winning pair
(i, argmin_j ||y - x||^2). Both directions of the symmetric Chamfer contribute additively tod_decoded; we usenp.add.atto scatter the X->Y direction correctly when multiple input points share the same nearest decoded neighbour. - Mode-collapse risk. With only the X->Y direction, the encoder can shrink all decoded points to the centroid of the input cloud and get a low loss. Including the Y->X direction (each input point must have a close decoded neighbour) prevents this; without it, training plateaus at recovery ≈ 36% (chance).
Open questions / next experiments
- Variable K. Restoring the paper’s
K ~ Uniform({1, 2, 3, 4})would require the model to predict per-capsule presence (a soft-min over which capsules are “active”). The infrastructure is here — just add a presence head to the decoder and weight the X->Y Chamfer term by presence — but recovery accuracy needs a different metric in the variable-K regime. - Learnable templates. Letting
TEMPLATESbe a parameter (3 trainable point sets) would test the actual SCAE thesis: that part identities emerge from the routing dynamics. The hardcoded version sidesteps that by definition. - Multi-head attention + LayerNorm. A 2-head SAB + 2-head PMA with LayerNorm is the standard Set Transformer. Probably wouldn’t change recovery much on this size of problem but would make the architecture more directly comparable to the paper.
- Larger
K. With K=5 templates and N>=15 points the local minima surface gets denser; whether the same training recipe (Adam at 3e-3 with K=3 hardcoded) survives is a useful stress test.