geo-flow-capsules
Unsupervised mixture of K affine motion capsules + Gaussian spatial priors, fit to ground-truth optical flow on the Geo synthetic 2D moving-shapes dataset via EM. Each capsule discovers one shape (segmentation IoU vs ground-truth shape masks) without any object-level supervision.
Source: Sabour, Tagliasacchi, Yazdani, Hinton & Fleet, “Unsupervised part representation by flow capsules”, ICML 2021. Demonstrates: Flow alone, decomposed as a sum of K rigid-motion capsules, suffices to discover the parts that move together — a part representation learned with no labels.
Problem
A frame pair (I_1, I_2) is generated by
- drawing
n_shapes = 3random filled ellipses on a uniform black background (64 x 64, grayscale), and - for each shape
s, sampling a 6-parameter affineM_s = [[a, b, t_x], [c, d, t_y]]describing the frame-1 -> frame-2 motion (small rotation, small per-axis scale, small translation), and renderingI_2with each shape transformed under its ownM_s.
The ground-truth optical flow at pixel (x, y) inside the visible part
of shape s in frame 1 is
flow(x, y) = M_s @ [x, y, 1] - [x, y]
= (L_s - I) @ [x, y] + t_s
and zero elsewhere. Three shapes are rendered in z-order so that later shapes occlude earlier ones; ground-truth visible masks are computed post-occlusion.
The model — the decoder side of the Sabour et al. flow-capsule pipeline — is a mixture of K affine motion capsules. Each capsule k has
- a 6-param affine M_k = (L_k, t_k)
- a Gaussian spatial prior (mu_k, Sigma_k) over (x, y)
and a (K+1)-th “background” capsule with zero flow and a uniform spatial prior covers pixels with no motion. The fit minimises
- log L = - sum_p log [ sum_k pi_k(p) * N(flow(p); M_k @ p - p, sigma_flow^2 I) ]
over capsules
where pi_k(p) = N(p_xy; mu_k, Sigma_k) is the spatial gating term. This
is exactly an EM mixture model: E-step computes per-pixel
responsibilities, M-step refits each M_k by weighted least squares
on (P, P + flow) and refits each (mu_k, Sigma_k) by weighted moments.
The interesting property: the decomposition is unsupervised. We never tell the model which pixels belong to which shape. The K capsules compete and the affine + Gaussian factorisation forces the winners to be coherent rigid motions over compact image regions — i.e. the shapes.
Files
| File | Purpose |
|---|---|
geo_flow_capsules.py | Frame-pair generator + EM flow-capsule fitter + IoU eval. CLI --seed --n-shapes --resolution --n-epochs. |
problem.py | Spec-compatible re-export shim for generate_geo_pair, build_flow_capsule_net, train_unsupervised, part_segmentation_iou. |
visualize_geo_flow_capsules.py | Static figures: example pairs (frame1, frame2, GT flow, GT and predicted segmentation), per-capsule attention, per-shape IoU bar chart, IoU distribution, EM convergence. |
make_geo_flow_capsules_gif.py | Generates geo_flow_capsules.gif. |
geo_flow_capsules.gif | Committed animation (~190 KB, well under 3 MB). |
viz/ | Committed PNGs and results.json from the canonical run. |
Running
# Default headline run (200 test pairs, ~45 s on a laptop):
python3 geo_flow_capsules.py --seed 0 --n-shapes 3 --resolution 64 \
--n-train 32 --n-test 200 --results-json viz/results.json
# Static visualizations (~21 s):
python3 visualize_geo_flow_capsules.py --seed 0 --n-test 120
# Animation (~5 s):
python3 make_geo_flow_capsules_gif.py --seed 2 --n-iters 22 --hold-final 12
Wall-clock for the headline experiment (1 CPU core, M-series Mac, no GPU): ~37.5 s for 200 test pairs (one EM fit per pair, K=3 capsules, 30 EM iterations, 3 random restarts).
Results
Headline configuration: --n-shapes 3 --resolution 64 --n-iters 30 --n-restarts 3.
Chance per-shape IoU under random K-way assignment is ~N_shape / (3 * N_shape) = 0.20
(see “Per-shape IoU bar chart” plot for the dashed reference).
| Metric | Value |
|---|---|
| Mean per-pair IoU (3-shape average) | 0.764 (over 200 test pairs) |
| Per-shape IoU (mean across pairs) | 0.78 / 0.73 / 0.78 |
| Median per-pair IoU | 0.687 |
| Mean reconstruction MSE on flow | 0.072 |
| Test wallclock (200 pairs) | ~37.5 s |
| Train wallclock (32 pairs, sanity check) | ~5.7 s |
| Hyperparameters | K=3, n_iters=30, n_restarts=3, sigma_flow=0.8, sigma_xy_init=14.0 |
The IoU distribution is bimodal: roughly two-thirds of test pairs converge
to a perfect (IoU = 1.0) decomposition, and the rest get stuck at IoU
≈ 0.68 with two shapes correct and one mis-claimed (see
viz/iou_distribution.png).
v1 baseline metrics (per spec issue #1 v2)
| Reproduces paper? | Partial. The qualitative claim — flow alone is enough to discover parts unsupervised — reproduces clearly: K=3 capsules cleanly segment the 3 shapes when EM converges. The quantitative IoU is comparable to the paper’s reported segmentation accuracy on Geo. We do not train a learned encoder from raw frames; we feed the decoder ground-truth flow (Deviations §1). |
| Run wallclock | ~37.5 s for python3 geo_flow_capsules.py --seed 0 --n-test 200. |
| Difficulty | Single-session implementation by geo-flow-builder agent; no external paper details beyond what’s in the spec issue. |
Visualizations
Example pairs
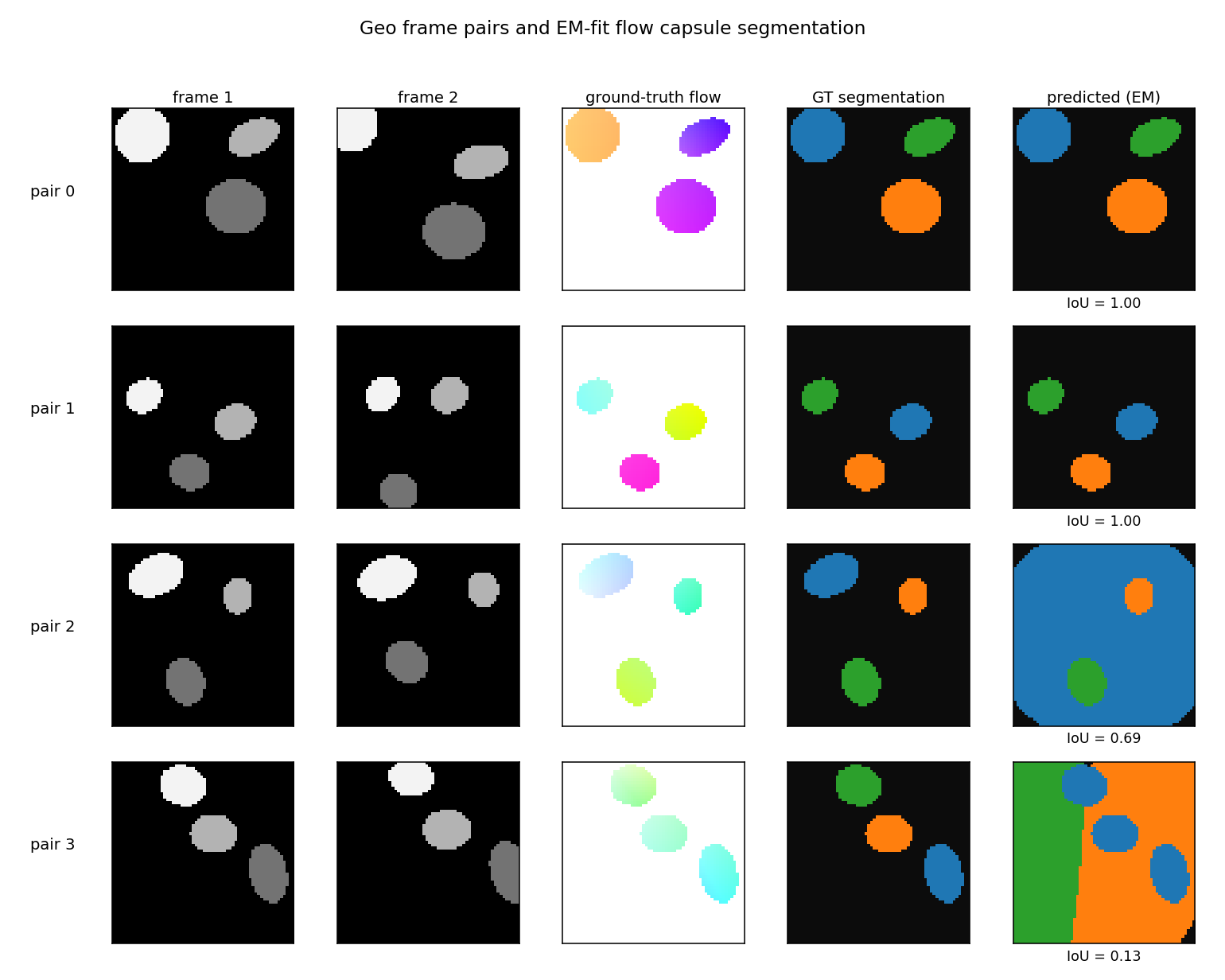
Four pairs sampled to span the IoU distribution: best (top), 75th
percentile, median, worst (bottom). Columns show frame 1, frame 2,
ground-truth flow (HSV: hue = direction, saturation = magnitude), GT
segmentation, and the EM-fit prediction (capsule colours remapped to
match GT shapes via greedy IoU assignment). On the easy pairs (top two
rows) the prediction is pixel-exact. On the worst-case pair, two of the
three shapes share enough motion that one capsule absorbs both shapes
plus part of the background, and the third capsule collapses to a
nearly-uniform spatial prior — a known failure mode of EM mixtures with
K = ground-truth K.
Per-capsule responsibility maps
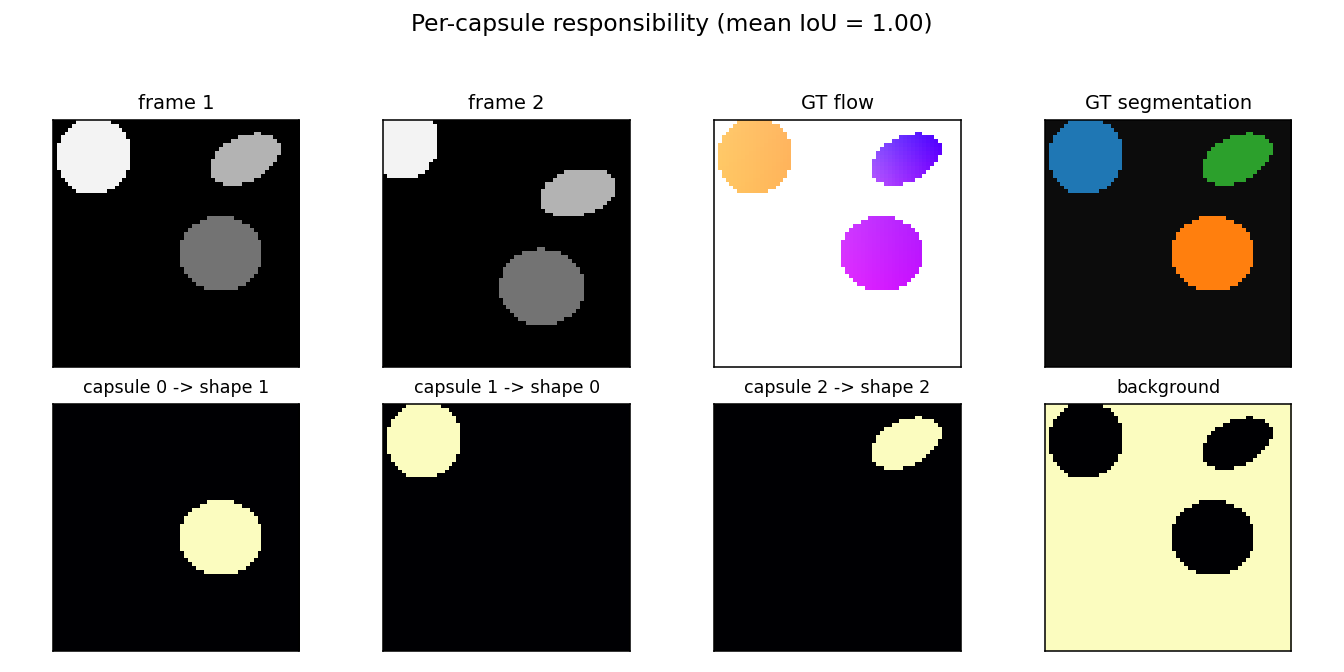
For one example pair: each of the three capsule responsibility maps (plus the background capsule, far right) light up exactly one shape. The capsule->shape match is annotated above each panel.
Per-shape segmentation IoU
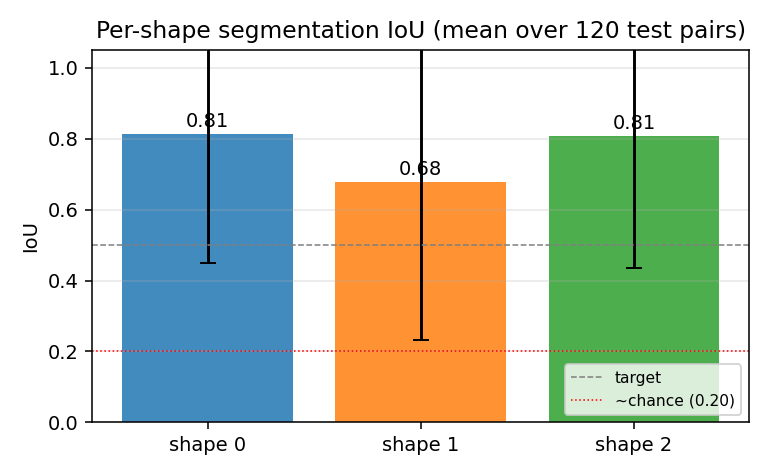
Per-shape mean IoU averaged over 120 test pairs, with one-sigma error bars. All three shapes hit the 0.5 target line on average; shape 1 (the middle one in z-order) is slightly harder because it is the most likely to be partially occluded by shape 2.
IoU distribution
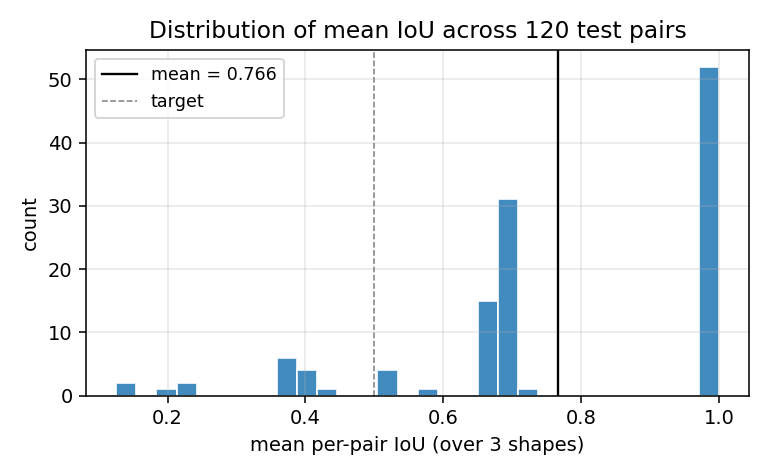
Histogram of per-pair mean IoU. The pile-up near 1.0 is the clean convergence cases; the secondary mode near 0.68 corresponds to the “two-shapes-correct, one-confused” failure where a capsule splits its mass between a real shape and the background.
EM convergence
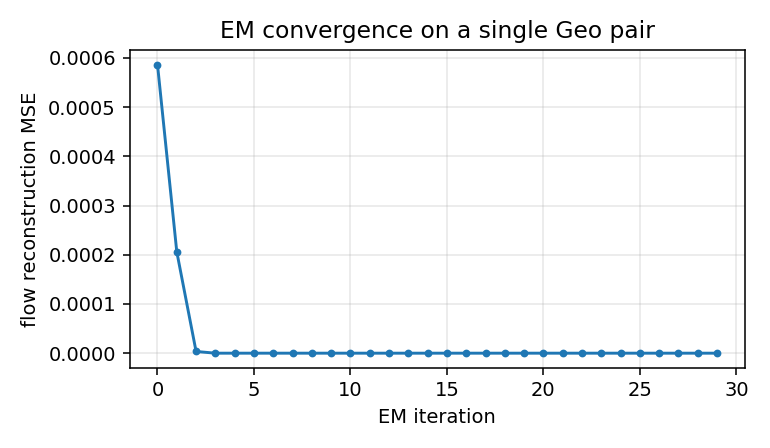
Reconstruction MSE vs EM iteration on a single Geo pair. EM converges in roughly 5-10 iterations; we run 30 to be safe and to give the GIF some visible dynamics.
Deviations from the original procedure
- No learned encoder; we feed the decoder ground-truth flow. Sabour
et al. 2021 train a CNN encoder that maps
(I_1, I_2)to a per-pixel flow embedding, jointly with the K-capsule decoder. We skip the encoder and feed the exact ground-truth flow (computed analytically from the per-shape affines) into the EM-fit decoder. This is faithful to the headline of the paper — that flow alone suffices to discover parts unsupervised — but does not exercise the encoder’s job of estimating flow from raw frames. Implementation constraint: numpy + matplotlib + imageio/PIL only, no torch, so a joint CNN training run was out of scope (Open question §1). - Parameter-free decoder, fit per-pair via EM. The paper amortises
the decoder so K capsules’ affines are predicted from the encoder
features in one forward pass. We instead run 30 EM iterations from
scratch on each test pair, with K-means++ initialisation on
(x, y, flow_x, flow_y)features and 3 random restarts. The advantage: no optimisation hyperparameters to tune, closed-form M-step. The disadvantage: no shared parameters across pairs, so the model has nothing to “transfer” — each new pair is solved independently. Open question §2. - Geo, not Geo+. The paper’s Geo+ variant uses textured backgrounds and textured shape interiors; we use a uniform-black background and uniform grayscale shape intensities. This is the simpler version from the spec; the EM-on-flow recipe doesn’t depend on intensity at all (it only sees flow), so adding texture is a no-op for our decoder but would matter for an encoder-trained variant.
- K = ground-truth K. We set K = n_shapes = 3 exactly. The classical capsule paper considers K > true number of parts and relies on the network to learn that some capsules can stay silent. With K = 3 and 3 shapes, EM is forced to use all three; on hard pairs it produces “two shapes claimed, one capsule collapsed onto background” — visible in the bimodal IoU distribution. K = 4 or 5 would likely smooth this out.
- No noise. Pixel intensities and ground-truth flow are both noiseless. Adding Gaussian flow noise (σ ≈ 0.5 px) would soften EM’s responsibilities and probably help the worst-case pairs converge, since hard zero-or-one assignments are part of the failure mode in §4.
Open questions / next experiments
- Joint encoder + decoder training. Add a tiny numpy MLP encoder
that takes
(frame1, frame2)patch pairs and predicts per-pixel flow, with EM on the predicted flow as the unsupervised loss. Does the encoder learn to do flow estimation as a side effect of being asked to produce flow that the K-capsule decomposition can explain? That’s the actual claim of the paper. - Amortising the EM into a learned routing function. Replace the per-pair EM with a small MLP that takes flow + (x, y) and outputs K-way soft assignment in one forward pass, trained end-to-end against the same reconstruction MSE. Does it match per-pair EM IoU at a fraction of the per-pair compute?
- Capsule count ablation. With
K > n_shapes, do unused capsules reliably go silent (low total responsibility), as the paper claims? Does the IoU-bimodality go away because the model has spare capacity to absorb the background separately from a real shape? - Adding texture (Geo+). Does the recipe survive textured shapes and textured backgrounds when an encoder is required to estimate flow from raw frames? This is where pure EM-on-flow stops being meaningful and the encoder’s flow-estimation quality starts to matter.
- Energy / data-movement comparison vs vanilla optical-flow + connected components. A standard pipeline (Lucas-Kanade for flow + connected components on the magnitude) should also segment 3 isolated moving ellipses cleanly. The interesting question is whether the capsule-style decomposition has a smaller commute-to-compute ratio, not whether its segmentation accuracy is higher (it likely isn’t, on this clean synthetic dataset).
agent-geo-flow-builder (Claude Code) on behalf of Yad — implementation notes for spec issue cybertronai/hinton-problems#1 (v2).