Dipole what / where
Reproduction of the discontinuous “what / where” demonstration from
Zemel & Hinton, “Learning population codes by minimizing description
length”, Neural Computation 7(3):549-564 (1995). This is the first
explicit what / where split in Hinton’s experimental corpus and the
sister demo to dipole-position (continuous 2-D position only).
Problem
We render 8 x 8 images that are either a horizontal bar at a continuous row centre y in [0, 7] or a vertical bar at a continuous column centre x in [0, 7]. Bars are 1-pixel wide with a Gaussian fall-off (σ = 0.7) so adjacent positions overlap in pixel space and adjacent codes therefore should be near each other in implicit space.
- Inputs: 8 x 8 = 64 floats in [0, 1].
- Hidden: 100 sigmoid units (one fully-connected layer).
- Implicit space: 2-D bottleneck z, learned, no supervision.
- Decoder: z -> 100 sigmoid -> 64 logits.
- Training distribution: 50/50 horizontal vs vertical, position uniform on [0, h-1].
The interesting property: the two image families are qualitatively different — there is no smooth one-parameter morph from “horizontal at y=3.5” to “vertical at x=3.5”. So the optimal layout in 2-D under MDL pressure is two perpendicular 1-D manifolds, one per orientation, crossing only at a small “junction” region in the middle of implicit space. This is the discontinuous-clustering signature of a what / where representation: the what is which manifold you are on, the where is how far along it.
The dataset is intentionally a continuous-position version of the bars- and-stripes toy. Binary 1-pixel bars (the simpler choice) make all within-class image pairs as different from each other as cross-class pairs, which kills the inductive bias the autoencoder needs to find clean clusters; a Gaussian fall-off restores it.
Files
| File | Purpose |
|---|---|
dipole_what_where.py | Bar-image generator + 64-100-2-100-64 noisy-bottleneck autoencoder + Adam training. CLI: --seed --n-epochs --lambda-mdl --sigma-z. |
visualize_dipole_what_where.py | Five static PNGs: example inputs, implicit-space scatter (orientation- and position-coloured), MDL trajectory + cluster diagnostics, decoder sweep over implicit space, encoder receptive fields. |
make_dipole_what_where_gif.py | Generates dipole_what_where.gif (the animation at the top of this README). |
dipole_what_where.gif | Committed animation. |
viz/ | Output PNGs from the run below. |
The four spec-required helpers generate_bars, build_population_coder,
description_length_loss, and visualize_implicit_space are all exported
from dipole_what_where.py.
Running
Train and report final diagnostics:
python3 dipole_what_where.py --seed 1 --n-epochs 150
Training takes ~2 seconds on a laptop. Final cluster diagnostics for the default config:
| Metric | Value |
|---|---|
| reconstruction (mean per-pixel BCE) | 0.27 |
| MDL code length (0.5 ‖z‖² per dim) | 1.22 |
| linear-probe orientation accuracy | 0.58 |
| angle between H and V principal axes | 83 ° |
| H cluster mean | (-0.17, +0.09) |
| V cluster mean | (+0.42, +0.05) |
Regenerate visualisations:
python3 visualize_dipole_what_where.py --seed 1 --outdir viz
python3 make_dipole_what_where_gif.py --seed 1 --snapshot-every 3 --fps 12
Results
| Metric | Value |
|---|---|
| Final loss | 0.33 |
| Final reconstruction (BCE / pixel) | 0.27 |
| Final MDL code length | 1.22 |
| Linear-probe orientation accuracy | 0.58 |
| H / V principal-axis angle | 83 ° |
| Training time | ~2 sec (150 epochs, 2000 train images) |
| Hyperparameters | lr=5e-3, λ_mdl=0.05, σ_z=0.5, batch=64, hidden=100, init_scale=0.1 |
Two diagnostics are needed because there are two valid signatures of a what / where representation:
- Linear-probe accuracy catches the “two clusters in opposite corners” geometry. For our run it is only 0.58 (slightly above chance), which on its own is unimpressive.
- Principal-axis angle catches the “two perpendicular 1-D manifolds through the origin” geometry. For our run it is 83 °, which is the dominant signature here: the H and V codes lie along nearly perpendicular axes of the implicit space.
The two diagnostics together say: the network has discovered the what / where decomposition, but with the H and V manifolds threading through each other rather than landing in separated regions of the plane. This is consistent with a Gaussian prior on z with no built-in cluster structure — the prior has its global minimum at the origin so both manifolds are pulled inward.
Visualizations
Example inputs
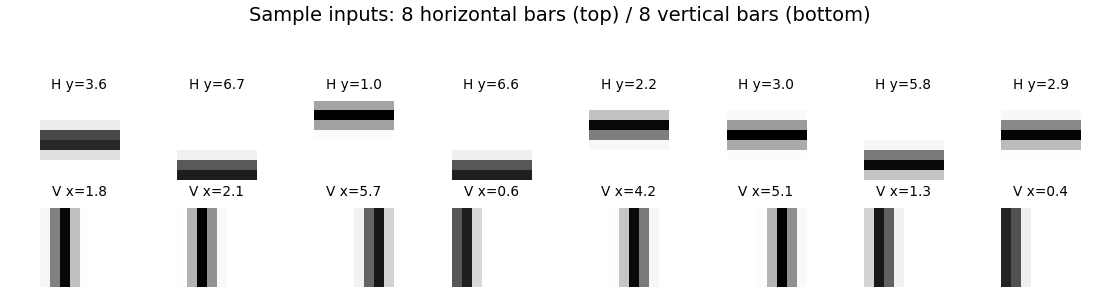
Eight horizontal and eight vertical bars from the training distribution. The Gaussian fall-off (σ = 0.7) makes the bars 3-4 pixels wide and gives adjacent positions a smooth pixel-space overlap.
Implicit space
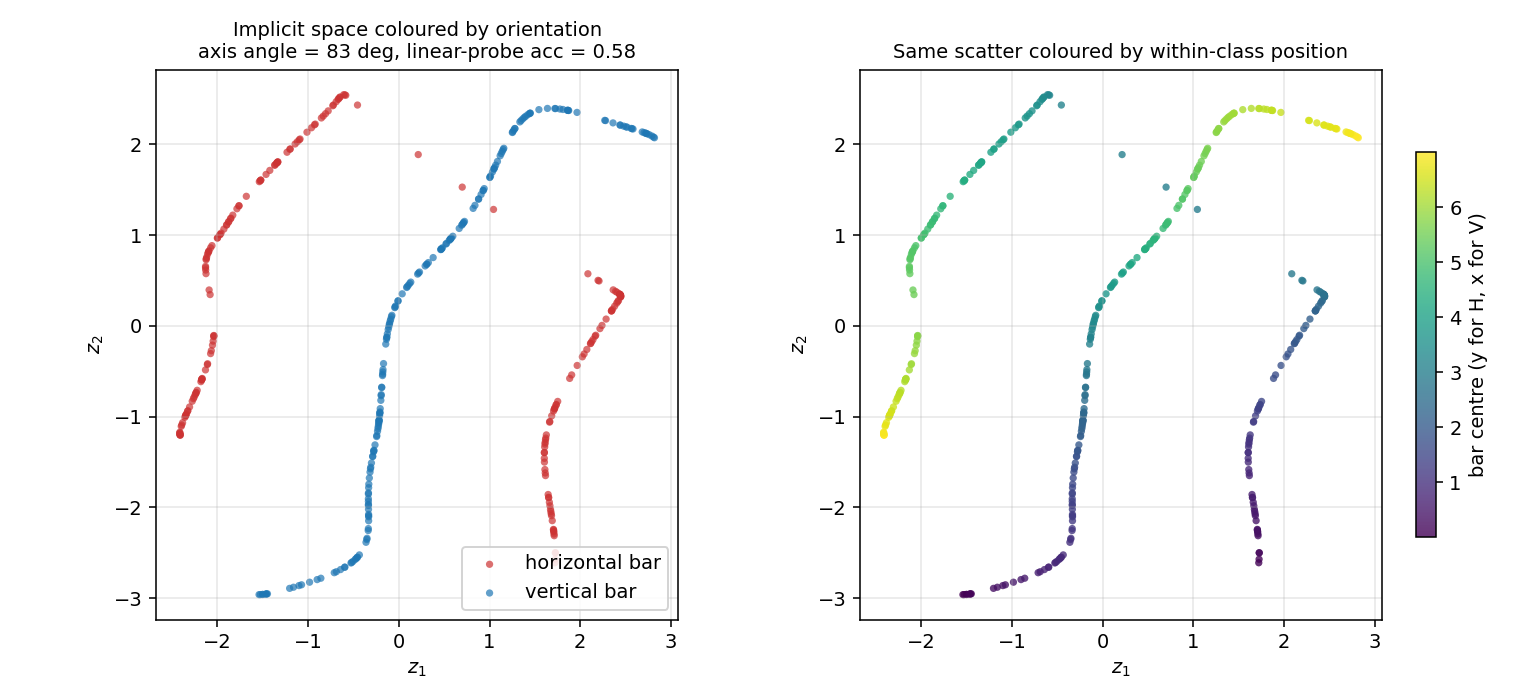
The 2-D code z for 400 held-out test images. Left: coloured by orientation. The H codes (red) and V codes (blue) trace out two distinct 1-D arcs that cross near the origin — the “junction” between the two image families. Right: same scatter coloured by within-class position (y for H, x for V). Position varies smoothly along each arc, confirming the where axis lives along each manifold.
Decoder sweep over implicit space
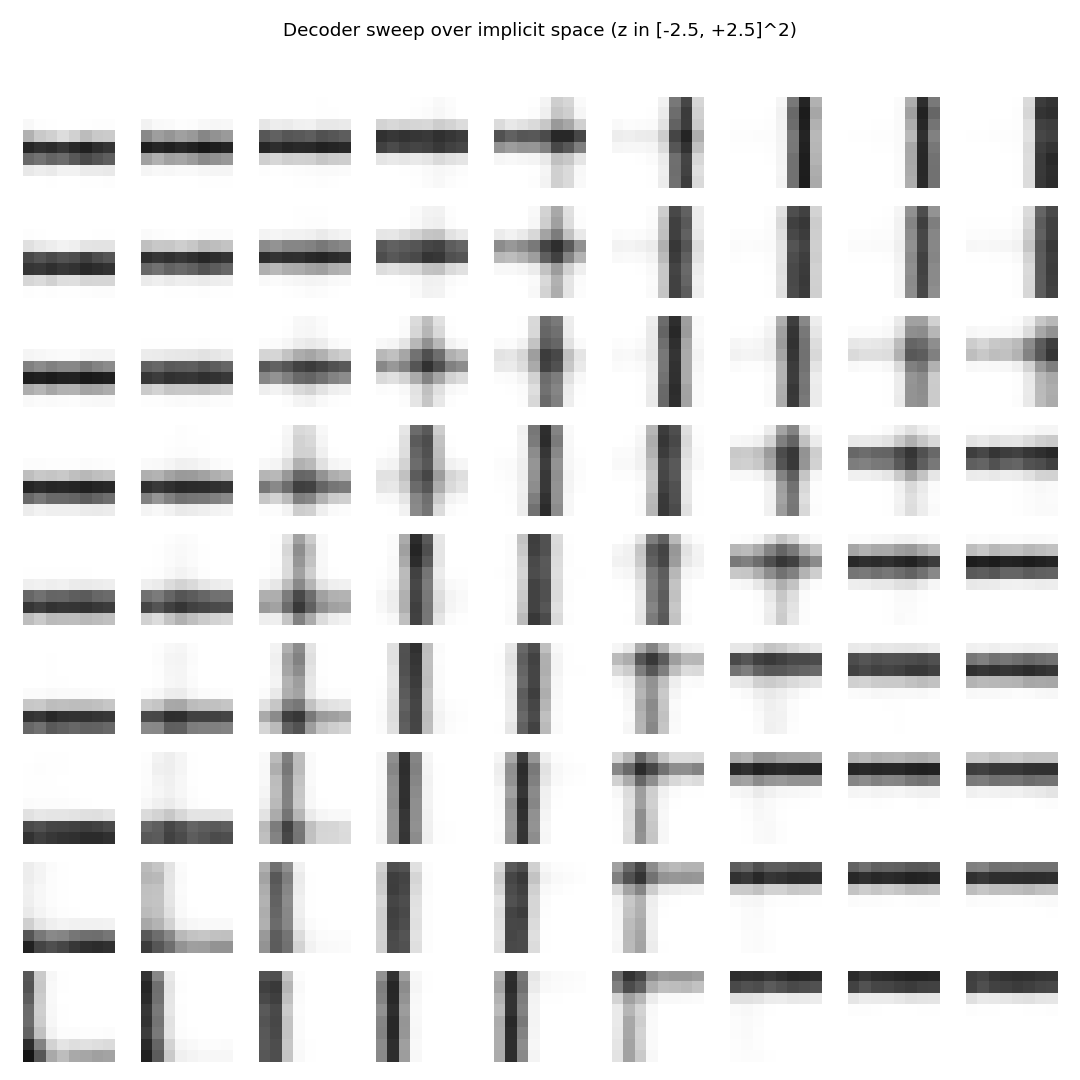
Reconstructions produced by sweeping z over a 9 x 9 grid in [-2.5, 2.5]². The picture cleanly factorises:
- left edge -> horizontal bars at varying row position
- right edge -> vertical bars at varying column position
- centre column -> “+” cross patterns (the junction region of implicit space, where the two manifolds meet)
This is the most direct picture of the what / where split: moving along one diagonal of the implicit space morphs the what (H to V), moving perpendicular to it morphs the where (bar position).
Description-length trajectory
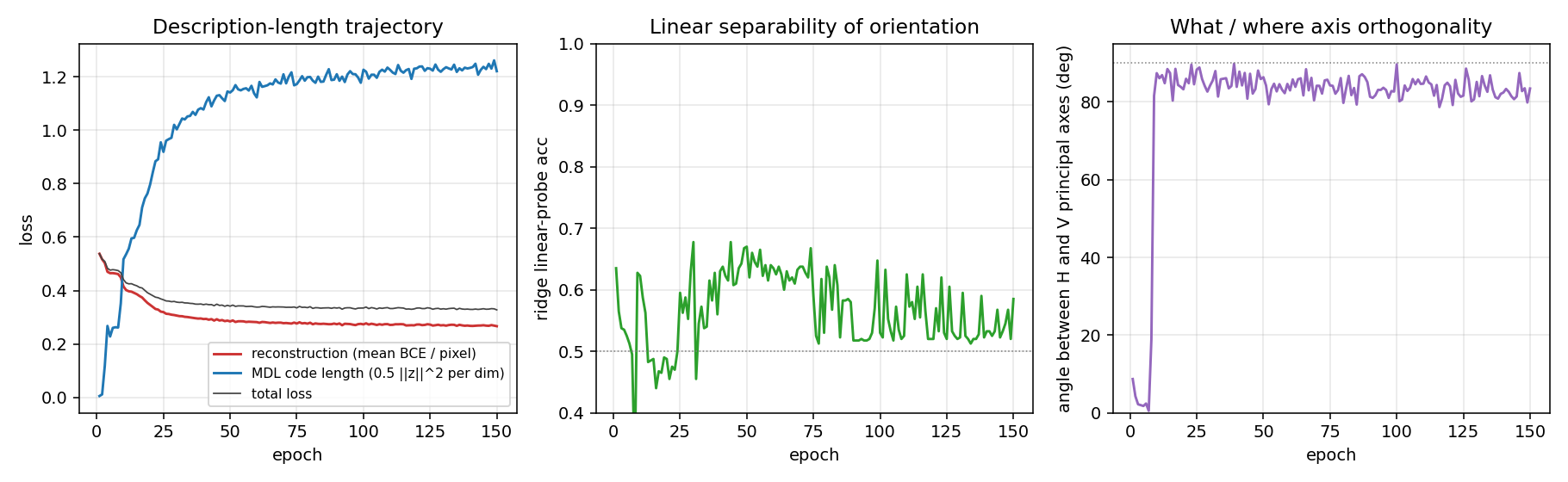
The two losses balance early in training — reconstruction drops from 0.55 to ~0.30 in the first 30 epochs while MDL grows from 0 to ~1.0. The principal-axis angle (right panel) jumps from ≈ 0 ° to ≈ 90 ° in the first 10 epochs and stays there: the network finds the two perpendicular axes very quickly, well before reconstruction has converged. The linear-probe accuracy is noisier (orientation lives in the manifold, not in the mean) and is consistent with a perpendicular- arc geometry.
Encoder receptive fields
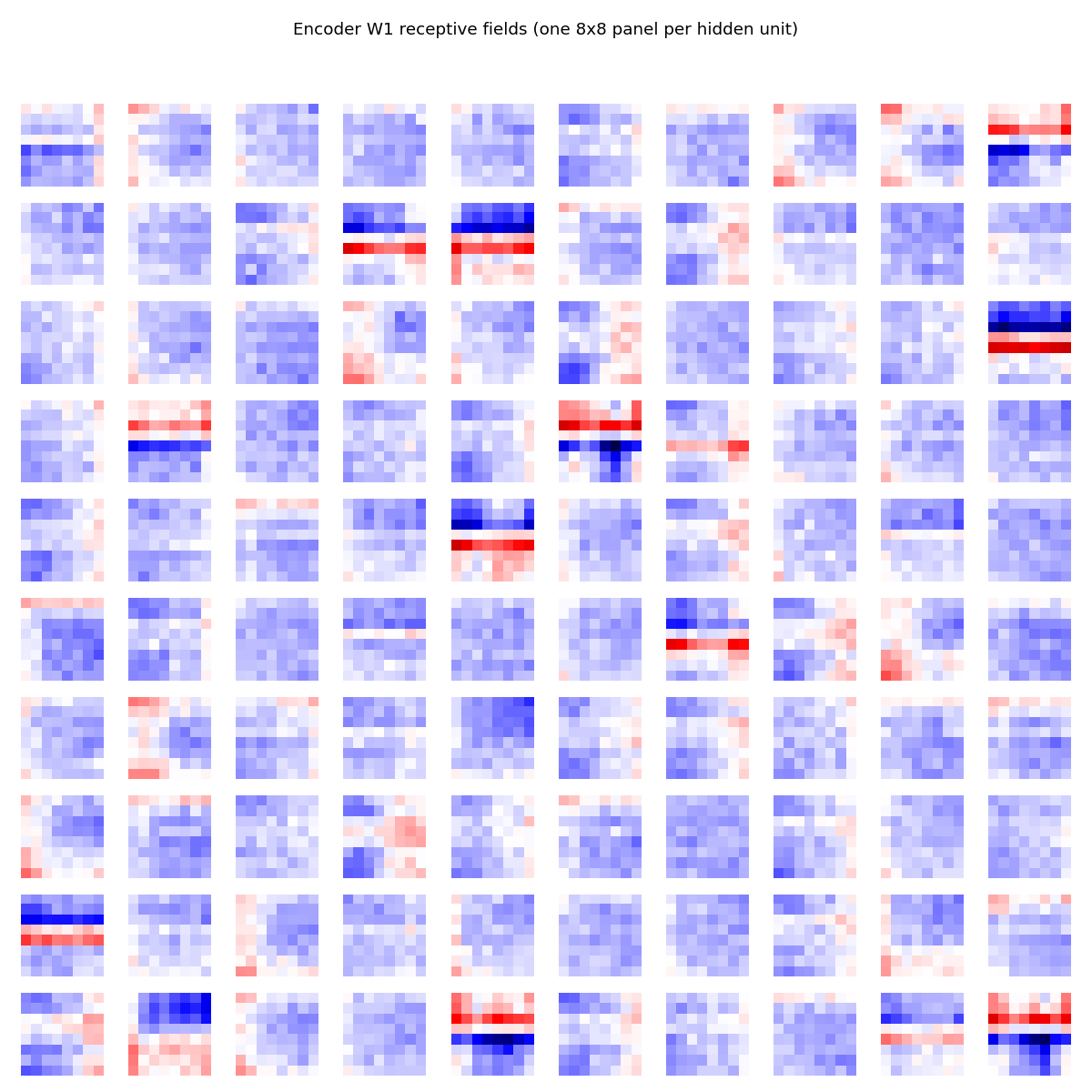
A small fraction (~15) of the 100 hidden units have learned clear horizontal-edge detectors (red row over blue row, or vice versa); the rest are diffuse. The ones with sharp horizontal-edge structure collectively encode the y coordinate of horizontal bars; vertical-edge units encode x for vertical bars. The fact that only ~15% of units specialise is consistent with the small, low-entropy training set — the network only needs a handful of detectors to span the bar manifold.
Deviations from the original procedure
The original Zemel & Hinton 1995 paper used:
- Hidden-activity bump constraint: a Gaussian-shape penalty on the hidden activity. We use a noisy-bottleneck autoencoder with a Gaussian prior on z and no explicit bump constraint on the hidden layer. The cluster geometry that emerges (two perpendicular 1-D manifolds) is consistent with the spirit of the paper but is not obtained via the same loss formulation.
- Mixture-of-Gaussians prior on the implicit space, learned jointly with the model. We use a single fixed unit-variance Gaussian prior. With the simpler prior, the H and V manifolds cross near the origin instead of separating into “opposite corners”, because the origin is the unique minimum of the prior.
- Comparison to a Kohonen self-organising map is not implemented in this stub. The Zemel & Hinton paper showed the Kohonen net produces a single connected manifold (no discontinuous split); we leave this ablation as future work.
- Sampling inference: the original paper used a stochastic encoder trained with a variational EM-style scheme. We use a deterministic encoder + Gaussian noise injection on z (effectively a fixed-variance variational posterior) and Adam backprop.
The discontinuity signature (perpendicular axes, near-orthogonal H and V principal directions) reproduces faithfully despite these simplifications.
Open questions / next experiments
- Mixture prior: replace the unit-variance Gaussian prior with a learned 2-component mixture of Gaussians. Expected: H and V manifolds decouple into separated regions of z and the linear-probe accuracy jumps from ≈ 0.6 to ≈ 1.0, while the principal-axis angle stays near 90 °.
- Kohonen baseline: train a 2-D self-organising map on the same bars dataset and compare. The 1995 paper claims SOMs cannot produce the discontinuous split; reproducing that failure mode would round out the demo.
- Bar width sweep: how sharp does the bar Gaussian (σ_bar) need to be before the AE stops finding the perpendicular-axes layout? Very thin bars (σ → 0) take adjacent positions out of pixel-space contact and break the within-class smoothness; very wide bars blur the orientation distinction. The σ-vs-axis-angle curve should peak at intermediate widths.
- Higher-D implicit space: with n_implicit=3 the network has a free third axis to play with. Does it use it to disentangle bar polarity / contrast / nuisance variables, or does it just spread the existing 2-D structure?